|
|
|


哈密顿原理和拉格朗日函数的由来是怎样的?
关注者
1,209
被浏览
335,741
21 个回答

逻辑上,哈密顿原理可以推出拉格朗日方程。但人们的认知过程是:先得出拉格朗日方程,再根据方程的形式总结出更基本的哈密顿原理。
先来看 两个问题 和 两个方程 。
第一个问题是 约束力问题 :如何消去牛顿运动方程中难以求解的 约束力 ?
拉格朗日 给出了答案:只要选取相互独立的广义坐标 q_\alpha, q_\beta... , 用它们去替代原有的笛卡尔坐标 x,y... , 就可以消去约束力和约束方程,让一组相互耦合的牛顿运动方程变成更简洁的相互独立的形式。代换后得到的方程就是 拉格朗日方程 :
\frac{d}{dt} \left(\frac{\partial{L}}{\partial{\dot{q}_\alpha}} \right)-\frac{\partial{L}}{\partial{q_\alpha}}=0
其中 L=T-V , 是体系的动能与势能的差,称为 拉格朗日量 。
第二个问题是 “最速降线”问题 :一个小球在只受重力、不计摩擦的情况下,从一点A, 以何种曲线运动到不高于A的B点,使整个过程所需的时间最短?
这个问题可以抽象成纯数学问题:当积分 J=\int_{x_1}^{x_2}F(x,y,y')dx 取极值时,函数 y(x) 应具有何种形式?
欧拉 用变分法给出了这个问题的答案,这个条件下的函数 y(x) 应满足 欧拉方程 :
\frac{d}{dx} \left(\frac{\partial{F}}{\partial{y'}} \right)-\frac{\partial{F}}{\partial{y}}=0

这两个方程是不同的人,在不同的时代,为解决完全不同的问题,而推出的具有完全不同意义的两个方程。但很明显,两个方程具有 一模一样的数学形式 。
这是巧合吗?
是的。
基于这一巧合, 哈密顿 提出:既然满足欧拉方程的函数 y(x) 使积分 J=\int_{x_1}^{x_2}F(x,y,y')dx 取极值,那么对应拉格朗日方程,也一定有积分 S=\int_{t_1}^{t_2}L(t,q_\alpha,\dot q_\alpha)dt 取极值。这个拉氏量在时间上的积分就是 哈密顿作用量 。上面分析说明: 力学体系从时刻 t_1 到时刻 t_2 的一切可能运动之中,只有使哈密顿作用量取极值的运动,才是实际发生的运动 。这就是 哈密顿原理 。从哈密顿原理可以推出拉格朗日方程,但发现的时间,却是拉式方程在先,哈氏原理在后。
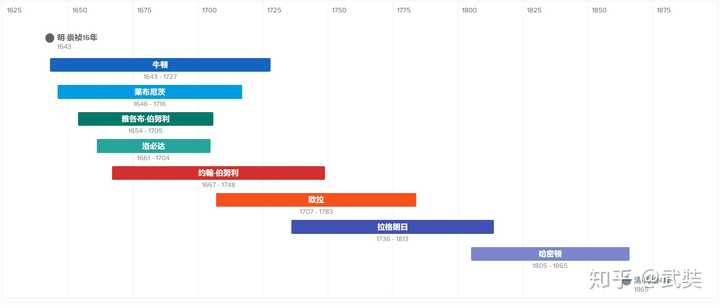
捋一下时间轴:1686年,牛顿《自然哲学的数学原理》出版,提出三定律,经典力学体系初步建成。1728年,欧拉用 变分法 求解最速降线问题,得到 欧拉方程 。1788年,拉格朗日完成 《分析力学》 ,提出 拉格朗日方程 。1843年,哈密顿基于欧拉方程和拉格朗日方程的极度相似,提出了 哈密顿原理 。
顺便看看同时代的中国:1686年,康熙爷与沙俄鏖战雅克萨,次年签订中俄《尼布楚条约》。1725年,雍正爷正全国推行“摊丁入亩”和“火耗归公”。1792年,乾隆爷正志得意满地撰写他的《十全武功记》。1842年,道光爷签订中英《南京条约》。
整体逻辑如上,那么拉格朗日方程和欧拉方程又分别是怎样得到的呢?
先看 拉格朗日方程 。
其实靠牛顿三定律,再加上具体的力的形式(比如万有引力定律),就可以列出质点运动方程:
F(\vec{r})=m\ddot{\vec{r}}
在笛卡尔坐标下分解为三个方向的三个微分方程:
\begin{cases} F_x=m\ddot{x}\\ F_y=m\ddot{y}\\ F_z=m\ddot{z} \end{cases}
靠这个方程原则上已经可以解出质点的坐标和速度随时间的演化,经典力学体系已经完备。
但实际遇到的力学问题千奇百怪,大部分问题光靠牛顿运动方程是难以准确求解的。解牛顿运动方程面临的最大问题就是 约束 。比如 单摆 。小球本应在空间中做自由落体运动,但现在用绳子把它拴在固定点O上,小球就只能在以O为圆心,以摆长为半径的圆弧轨道上运动。这就是 约束 。绳子施加给小球,让它保持在轨道上不逃走的张力,就是 约束力 。和重力不同,这个约束力是未知的。
但列牛顿运动方程要求写出所有的力:
\vec T+\vec G =m \ddot{\vec r}
按笛卡尔坐标分解:
\begin{cases} T_x=m\ddot{x}\\ \\ T_y-mg=m\ddot{y}\\ \end{cases}
由于引入了额外的未知量——约束力,方程无法求解。这就是约束带来的最大问题。不过别忘了,我们还有已知条件没有利用,那就是 约束方程 。由于被绳子约束,小球的两个坐标并不独立,它们满足:
x^2+y^2=l^2
所以
\begin{cases} T\frac{-x}{\sqrt{x^2+y^2}}=m\ddot{x}\\\\ T\frac{y}{\sqrt{x^2+y^2}}-mg=m\ddot{y}\\\\ x^2+y^2=l^2 \end{cases}
三个方程,三个未知量,原则上可解。所以, 含有约束的问题,如果要用牛顿运动方程求解,就必须引入未知的约束力,并同时引入和约束力数量相等的约束方程,使方程组可解。 不过这样一来就同时增加了未知量和方程的数量。并且由于坐标不独立,各方向的微分方程相互耦合,极难求解。
拉格朗日 给出了全新的解法。他的思路是:虽然约束力很复杂,但是大部分情况我们想知道的只是质点的运动情况,而不是约束力,那么 能不能绕开约束力直接求解质点的运动?
答案是肯定的。
约束 的实质是 降维 。绳子把 二维 平面中运动的小球限制在了一条 一维 的圆弧上。如果没有绳子,小球在水平和竖直两个方向上的坐标 x,y 相互独立, 自由度是2 . 有了绳的约束,两个个坐标只要任意给定一个,则另外一个也随之确定, 自由度是1 . 所以,只要用一个坐标,就可以确定小球的位置。这个坐标可以是 x,y 中的一个,也可以是一个新的参数。这个用以确定小球位置的参数,就是 广义坐标 。在这个例子里,选择绳和竖直方向的夹角 \theta 为广义坐标是方便的。准确地说,应该是选 \theta 和 r 为广义坐标,它们分别表示圆弧轨道的 切向 和 径向 。只是这里由于绳子的存在,径向的广义坐标 r 永远不变。所以只研究表示切向运动的 \theta 就可以了。这样, 通过坐标变换,就把一个由两个不独立的坐标描述的问题,变成了用一个独立坐标描述的问题 。
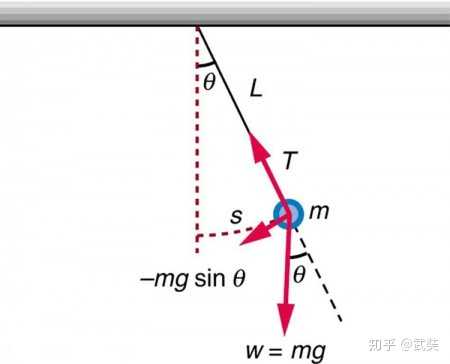
而且,这样选择广义坐标后,就会发现,约束力 \vec T 永远沿径向,而切向分量永远为零。于是在我们关心的切向的运动方程里,将不会出现约束力!切向的受力只有重力的一个分量,于是方程为:
mg \sin\theta=m\dot{v}_\bot=ml\ddot{\theta}
如果 \theta 足够小,方程可化为:
mg\theta=ml\ddot{\theta}
这和一维线性谐振子的运动方程一模一样,解是正弦函数。这是后话。
这样,就可以把前面那相互耦合的的2个微分方程+1个约束方程=总共3个方程,转化为仅仅1个独立的微分方程。
所以说,解一个有约束的力学问题,有两种方法:牛顿方法和拉格朗日方法。 牛顿方法的思路是:引入 n 个未知的约束力,为保证方程可解,同时增加 n 个约束方程。拉格朗日方法则截然相反,通过选取恰当的广义坐标,直接消去所有的约束力和约束方程。
这样,面对诸如“套在环上的小环”,“一个端点固定的杆”,“被束缚在轨道上的过山车”等等这样有约束的力学问题时,就总可以用拉格朗日的思路,找到合适的广义坐标,避开约束力去列出独立精简的运动方程了。
就这么简单?
远不是。
“剑一人敌,不足学,学万人敌。”
项羽当年嫌剑法只能一对一打斗,没意思,闹着要学能万人敌的兵法。
诚然我们可以根据刚才拉格朗日的思路,在各个实际的具体问题中找到合适的方向和坐标,把约束力和约束方程避开,列出运动方程。正如用一把剑,把敌人一个一个地杀死。
但拉格朗日和楚霸王同样心高气傲。他岂能满足于“具体问题具体分析”的雕虫小技?他要开宗立派,他要把这种思想升华为普适的,能一劳永逸地解决一切力学问题的根本性方法!
他做到了。1788年,巨著《分析力学》出版。在这部书中没有一幅插图,完全用数学分析的方法来解决所有力学问题,和牛顿的《自然哲学的数学原理》中比比皆是的几何分析形成刺目的对比。“四大力学”之首的理论力学由此奠基。拉氏从此封神。
那个能一劳永逸地解决所有问题的法门,就是 拉格朗日方程 :
\frac{d}{dt} \left(\frac{\partial{L}}{\partial{\dot{q}_\alpha}} \right)-\frac{\partial{L}}{\partial{q_\alpha}}=0
其中 L=T-V , 是体系的动能与势能的差,称为 拉格朗日量 。 q_\alpha 是选取的 广义坐标 。它对时间的导数就是 广义速度 。
刚才单摆的例子中, q_\alpha=\theta , 动能和势能分别为:
T=\frac12mv^2=\frac12ml^2\dot\theta^2
V=mgl(1-\cos\theta)
(以最低点为零势能点)
拉氏量:
L=T-V=\frac12ml^2\dot\theta^2-mgl(1-\cos\theta)
代入拉式方程得:
\frac{d}{dt} \left(ml^2\dot\theta\right)-mgl\sin\theta=0
即
ml^2\ddot\theta-mgl\sin\theta=0
和上一部分得到的方程一模一样(多乘了一个 l , 可理解为力矩和角动量的变化)。
这就是“万人敌”的拉格朗日方程。把动能和势能用广义坐标表示出之后,丢进去,直接输出想要的独立微分方程。
那么这个方程是怎样得到的?
对于一个运动的质点,我们的出发点是牛顿运动方程:
\vec{F}+\vec{R}=m\ddot{\vec{r}}
其中,力被分成了主动力 \vec{F} 和约束力 \vec{R} 两部分。上式也可以写成:
\vec{F}+\vec{R}-m\ddot{\vec{r}}=0
现在希望消去约束力,应该怎么办?
这就要用到一个性质: 约束力不做功 。原因是质点如果被约束在一条轨道,或一个曲面上时,约束力总是和这个轨道或曲面垂直,从而从不做功。这样,设想如果质点在这个轨道或曲面内发生一个小位移 \delta \vec r , 必有 \vec{R}\cdot\delta \vec r=0 . 于是在牛顿运动方程两边乘上 \delta \vec r , 即可消去约束力:
(\vec{F}-m\ddot{\vec{r}})\cdot\delta \vec r=0
这就是 达朗贝尔原理 。注意刚刚乘的小位移 \delta \vec r 并不是任意的,而是要在 约束允许的范围内 。它也有个专门的名字,叫 虚位移 。把上式在笛卡尔坐标下展开:
(F_x-m\ddot{x})\cdot\delta x+(F_y-m\ddot{y})\cdot\delta y+(F_z-m\ddot{z})\cdot\delta z=0
把 x,y,z 记作 x_1,x_2,x_3 . 可以把上式写成紧凑的形式:
\sum_{i}^{}{(F_i-m\ddot{x_i})\cdot\delta x_i}=0
由于约束的存在,虚位移的三个分量是不独立的。他们的关系由 约束方程 决定。如果约束是一个曲面,则有一个约束方程。如果约束是一条曲线,则有两个约束方程。如果不存在约束,则三个方向的虚位移独立,可任意取值。这时运动方程就退化回牛顿形式。
假设约束后的物体自由度是2,则可选取2个独立的广义坐标 q_1, q_2 取代 x_1, x_2,x_3 来描述位置:
\begin{cases} x_1=x_1(q_1,q_2)\\\\ x_2=x_2(q_1,q_2)\\ \\x_3=x_3(q_1,q_2)\\ \end{cases}
所以,虚位移可表示为:
\delta x_1=\frac{\partial x_1}{\partial q_1}\delta q_1+\frac{\partial x_1}{\partial q_2}\delta q_2
一般地,有:
\delta x_i=\sum_\alpha {\frac{\partial x_i}{\partial q_\alpha}\delta q_\alpha}
把它代入达朗贝尔原理等式,就可以把笛卡尔坐标替换为广义坐标:
\sum_{i}{\sum_\alpha{(F_i-m\ddot{x_i}) \cdot{\frac{\partial x_i}{\partial q_\alpha}}} \delta q_\alpha}=0
求和次序可交换:
\sum_{\alpha}{\left( \sum_i{(F_i-m\ddot{x_i}){\frac{\partial x_i}{\partial q_\alpha}}} \right) \cdot \delta q_\alpha}=0
由于各个 \delta q_\alpha 独立自由,可任意变化,于是每个 \delta q_\alpha 前面的乘数必须为零:
\sum_i{(F_i-m\ddot{x_i}){\frac{\partial x_i}{\partial q_\alpha}}} =0
到了这里,就把按笛卡尔坐标三个分量方向划分的相互耦合的方程,转换为沿广义坐标方向的独立方程。但是还没完,我们还需要把方程里残留的笛卡尔坐标 x_i 都消掉,变成彻底由广义坐标表示的方程。
方程左边由两项构成,第一项简单:
Q_\alpha =\sum_i{F_i{\frac{\partial x_i}{\partial q_\alpha}}}
它表示力在广义坐标 q_\alpha 方向上的分量,叫做 广义力 。如果质点受到的力为保守力,则广义力还可以表示为势能的函数:
Q_\alpha =\sum_i{-\frac{\partial V}{\partial x_i}{\frac{\partial x_i}{\partial q_\alpha}}} =-\frac{\partial V}{\partial q_\alpha}
第二项比较棘手:
P_\alpha= \sum_i{m\ddot{x_i}{\frac{\partial x_i}{\partial q_\alpha}}}
怎样消去其中的 \ddot x_i ?
利用分部求导法则,可以先把二阶导数降为一阶导数:
m\ddot{x_i}{\frac{\partial x_i}{\partial q_\alpha}}= \frac{d}{dt} \left( m\dot{x_i}{\frac{\partial x_i}{\partial q_\alpha}}\right)- m\dot{x_i}\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right)
可以看出, m\dot{x}_i=mv_i 其实就是动量在某个方向的分量,它等于动能对速度的导数:
\frac{\partial T}{\partial \dot{x}_i}= \frac{\partial (\frac12 m\dot x_i^2)}{\partial \dot{x}_i}=m\dot{x}_i
这样前面的式子就变成:
m\ddot{x_i}{\frac{\partial x_i}{\partial q_\alpha}}= \frac{d}{dt} \left( \frac{\partial T}{\partial \dot{x}_i}{\frac{\partial x_i}{\partial q_\alpha}}\right)- \frac{\partial T}{\partial \dot{x}_i}\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right)
离成功越来越近了,可惜还差一点。我们希望可以消去中间变量 x_i 而把式子全部表示成动能 T 和广义坐标 q_\alpha 之间的关系。令人欣慰的是,确实可以做到这一点。
首先,由复合函数求导法则,有:
\dot x_i=\sum_{\alpha}{\frac{\partial x_i}{\partial q_\alpha}\frac{dq_\alpha}{dt} }=\sum_{\alpha}{\frac{\partial x_i}{\partial q_\alpha}\dot q_\alpha}
两边对 \dot q_\alpha 求导,可得:
\frac{\partial \dot x_i}{\partial \dot q_\alpha}=\frac{\partial x_i}{\partial q_\alpha} ①
另外,还是由复合函数求导法则:
\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right)=\sum_{\beta}{\frac{\partial ^2x_i}{\partial q_\beta\partial q_\alpha}\dot q_\beta}=\sum_{\beta}{{\frac{\partial }{\partial q_\alpha}}\left( \frac{\partial x_i}{\partial q_\beta} \right)\dot q_\beta}
因 \dot q_\beta 与 q_\alpha 无关。所以上式变成:
\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right)=\frac{\partial }{\partial q_\alpha}\sum_{\beta}{{}\left( \frac{\partial x_i}{\partial q_\beta} \dot q_\beta\right)}=\frac{\partial \dot x_i}{\partial q_\alpha} ②
实际上就是 \frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right) 可以交换求导次序。
把 ① 和 ② 代入 P_\alpha 的表达式,得:
\begin {align} P_\alpha &= \sum_i{ \left[\frac{d}{dt} \left( \frac{\partial T}{\partial \dot{x}_i}{\frac{\partial x_i}{\partial q_\alpha}}\right)- \frac{\partial T}{\partial \dot{x}_i}\frac{d}{dt} \left( \frac{\partial x_i}{\partial q_\alpha} \right) \right]} \\\\ &=\sum_i{ \left[\frac{d}{dt} \left( \frac{\partial T}{\partial \dot{x}_i}{\frac{\partial \dot x_i}{\partial \dot q_\alpha}}\right)- \frac{\partial T}{\partial \dot{x}_i} \frac{\partial \dot x_i}{\partial q_\alpha} \right]} \\\\ &= \frac{d}{dt} \left( \frac{\partial T} {\partial \dot q_\alpha}\right)- \frac{\partial T}{\partial q_\alpha}\\ \end {align}
把算出的 P_\alpha 和 Q_\alpha 代回原方程有:
\frac{d}{dt} \left( \frac{\partial T} {\partial \dot q_\alpha}\right)- \frac{\partial T}{\partial q_\alpha}=Q_\alpha
这就是拉格朗日方程。如前所述,如果物体受力为保守力,广义力还可表示成势能的函数,于是方程可写成:
\frac{d}{dt} \left( \frac{\partial T} {\partial \dot q_\alpha}\right)- \frac{\partial T}{\partial q_\alpha}=- \frac{\partial V}{\partial q_\alpha}
移项合并就可得到最常见的保守系的拉格朗日方程:
\frac{d}{dt} \left(\frac{\partial{L}}{\partial{\dot{q}_\alpha}} \right)-\frac{\partial{L}}{\partial{q_\alpha}}=0
其中 L=T-V , 是体系的动能与势能的差,称为 拉格朗日量 。
还要说明的是,上面的推导是基于一个质点的运动,其实很容易就可以推广到N个质点的力学系统。只需要把所有物体的自由度都加到求和号里,把求和总数由3变成3N就可以了,其他一切不变。
至此,终于得到“一劳永逸地解决所有力学问题”的方程。不得不说,拉格朗日实在太伟大了。
再来看看 欧拉方程 。
引入欧拉方程的目的很单纯,就是要解决“ 最速降线 ”问题:一个小球在只受重力、不计摩擦的情况下,从一点A, 以何种曲线运动到不高于A的B点,使整个过程所需的时间最短?
把整个过程分成一系列无限小元过程,则下落的总时间为:
t=\int_A^B{dt}
只有这个式子没用,关键要把时间和轨道方程联系起来。设水平向右为 x 轴正方向,设竖直向下 y 轴为正方向,设曲线方程为 y=y(x)
下落过程中,小球重力势能不断转化为动能,于是
mgy=\frac12mv^2
于是
v=\sqrt{2gy}
也就是,当小球运动到 y 这个高度时,速度的大小。而在高度 y 处,一小块轨道的弧长为:
ds=\sqrt{dx^2+dy^2}=dx\sqrt{1+y'^2}
所以小球在轨道上运行一段弧长所需的时间,也就是一个元过程的时间为:
dt=\frac{ds}{v}=\frac{dx\sqrt{1+y'^2}} {\sqrt{2gy}}
于是整个过程所花的时间:
t=\int_A^B{\sqrt{\frac{1+y'^2}{2gy}}dx}
其中 y 和 y' 都是 x 的函数,这就把时间和轨道的曲线方程联系起来了。到此为止都很容易理解。但问题才刚刚开始:什么样的 y(x) 才能让 t 是最小的呢?

这里插一句,“最速降线”问题是 约翰·伯努利 (1667-1748)为了和同时代的其他大神飚智商在1697年创造出来的题目。当时除了约翰本人以外一共四个人算出了答案,他们是:约翰的哥哥 雅克布·伯努利 (1654-1705),约翰的老师 莱布尼茨 (1646-1716),约翰的学生 洛必达 (1661-1704),还有 牛顿 (1643-1727)。他们的解法各有特点,其中不乏特别巧妙的地方,比如约翰就利用了几何光学的费马原理给出了非常简洁的推导。不过这里不打算详细介绍这些解法,因为这和本文主题并无多大关系。
这里想说的是 约翰·伯努利 的另一个学生 欧拉 (1707-1783)基于最速降线问题提出的一种思考问题的套路—— 变分法 。
还接着上面的式子说。刚刚算出小球滚落的时间为:
t=\int_A^B{\sqrt{\frac{1+y'^2}{2gy}}dx}
这本质上是一个求极值的问题,也就是:当 y 为何种形式的函数时, t 取极值?欧拉不仅仅局限于这一个具体的函数形式,他把问题抽象为更一般的形式:
J(y)=\int_A^B{F(x,y,y')dx}
即上式中当 y 为何种形式的函数时, J 取极值?
注意这里 J 的取值取决于函数 y ,即对于每一种 y 的形式,都有一个 J 的数值与之对应。于是 J 就是关于函数 y 的“函数”。但这种“函数”并非通常意义的函数,因为它的自变量不是数,而是函数。这种“自变量是函数的函数”,就是 泛函 。欧拉就这样把一个具体的求 “最速降线” 问题升华成了一个抽象的求 “泛函极值” 的问题。
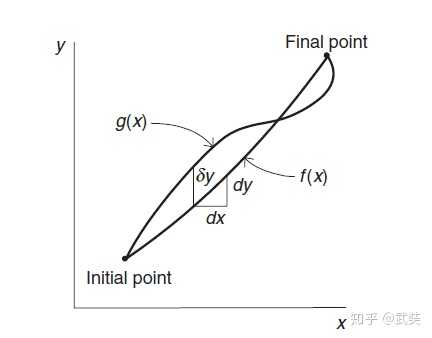
如图,AB是两个固定点,函数 y 可理解为AB之间的一根琴弦。现在轻轻拨动琴弦,让函数 y 有一个小变化,变为 y+\delta y , 这里 \delta y 就称为函数 y(x) 的 变分 ,也就是一个函数整体的变化。为了和数的变化——微分区别,用希腊字母 \delta 表示。 y 变化时,泛函 J 也相应改变。改变量为:
\begin{align}J(y+\delta y)-J(y) &=\int_A^B{[F(x,y+\delta y,y'+\delta y')-F(x,y,y')]dx}\\ &=\int_A^B{[\frac{\partial F}{\partial y}\delta y+\frac{\partial F}{\partial y'}\delta y']dx} \end{align}
这个泛函的变化量就称为 泛函的变分 ,记作:
\delta J=\int_A^B{[\frac{\partial F}{\partial y}\delta y+\frac{\partial F}{\partial y'}\delta y']dx}
现在要求的是泛函 J 何时取极值。大家都知道如果求一个函数 f(x) 的极值,只需令 f'(x)=0 就可以求出。可是泛函的自变量是函数,它极值点怎么求?
设问题的解,即让泛函取极值的函数为 y=y(x) . 让 y 有一个小变化,变为 y(x)+\delta y . 把变分表示为一个小参数和任意一个函数的乘积:
\delta y=\varepsilon\cdot \eta (x) 这样,泛函 J(\varepsilon) 就成了参数 \varepsilon 的函数。这样,就把关于函数 y 的泛函,转化成了关于参数 \varepsilon 的函数, 这就巧妙地把泛函极值问题转化为函数极值问题 。因为泛函取极值时,参数 \varepsilon=0 ,所以有:
J'(0)=\frac{dJ}{d \varepsilon}|_{\varepsilon=0}=0
泛函变分可表示为
\begin{align} \delta J &=J(\varepsilon)-J(0) \\ &=J'(0)\cdot\varepsilon \end{align}
所以 J'(0)=0 和 \delta J=0 是等价的。于是整个问题就转化为: y 取何形式时,泛函 J 的变分等于零? 也就是:
\delta J=\int_A^B{[\frac{\partial F}{\partial y}\delta y+\frac{\partial F}{\partial y'}\delta y']dx}=0
用分部积分法把上式第二项做代换:
\begin{align} \int_A^B{\frac{\partial F}{\partial y'}\delta y'dx} &=\int_A^B{\frac{\partial F}{\partial y'}\frac{d(\delta y)}{dx}dx}\\ &=\int_A^B{\frac{\partial F}{\partial y'}{d(\delta y)}}\\ &=\left[ \frac{\partial F}{\partial y'}{\delta y} \right]_A^B-\int_A^B{\frac{d}{dx} \left({\frac{\partial F}{\partial y'}} \right) {\delta y} dx}\\ \end {align}
代回,得:
\delta J=\left[ \frac{\partial F}{\partial y'}{\delta y} \right]_A^B+\int_A^B{\left[ \frac{\partial F}{\partial y}\delta y-\frac{d}{dx} \left({\frac{\partial F}{\partial y'}} \right) {\delta y} \right] dx}
因为端点AB固定,所以在A点和B点处 \delta y=0 , 所以上式第一项为零,所以:
\delta J=\int_A^B{\left[ \frac{\partial F}{\partial y}-\frac{d}{dx} \left({\frac{\partial F}{\partial y'}} \right) \right]{\delta y} dx}
要让上式为零对于任意 \delta y 都成立,必须有:
\frac{\partial F}{\partial y}-\frac{d}{dx} \left({\frac{\partial F}{\partial y'}} \right) =0
也就是:
\frac{d}{dx} \left(\frac{\partial{F}}{\partial{y'}} \right)-\frac{\partial{F}}{\partial{y}}=0
这就是 欧拉方程: 要让泛函 J(y)=\int_A^B{F(x,y,y')dx} 取极值,函数 y(x) 必须满足的方程。
只要把具体的关系 F=\sqrt{\frac{1+y'^2}{2gy}} 代入欧拉方程,即可求得最速降线。最终的解可以用参数方程表示:
\begin {cases} x=\frac12k^2(\theta -\sin \theta)\\\\ y=\frac12k^2(1 -\cos \theta)\\ \end {cases}
这是一条摆线,也叫旋轮线。这里就不多说了。
1728年,欧拉用 变分法 求解最速降线问题,得到 欧拉方程 。60年后,小欧拉30岁的拉格朗日完成《分析力学》,提出 拉格朗日方程 。这是在时间、空间、思想上都完全独立的两条线,却神奇地得到了一个长得一模一样的方程。后来大家合称它们为 欧拉-拉格朗日方程 。
又过了50多年,小拉格朗日70岁的爱尔兰人哈密顿让这两条独立的线交汇。他看到两个方程的一致性,自然地想到:既然欧拉方程背后对应着一个取极值的积分,拉格朗日方程自然也有。这个积分就是拉格朗日量对时间的积分,也就是 哈密顿作用量 。一个力学体系,实际走过的路径必取哈密顿作用量取极值的那一条,这就是 哈密顿原理 。
像这样把一个 老方法 应用到 新问题 ,得到 新结论 的故事,在物理学历史上比比皆是。
比如后来,又是 哈密顿 ,把 勒让德变换 应用到 拉格朗日方程 ,使之降阶,导出了他的 哈密顿方程 ,创立和 拉格朗日力学 同样重要的 哈密顿力学 。理论力学双峰并立之格局始成。
这是后话。
完。

匿名用户
最小作用量原理的历史沿革
原创
所有参考资料来自wikipedia和清华大学李岩松老师的讲义
光学中的“ 最短路程原理 ”,早在古希腊时代,欧几里得和海伦(就是三角形海伦公式的那个海伦)等人就提出过。
但早期的“最短路程原理”更多是一种哲学概念,真正将之变为科学理论,并应用其解决实际问题的是费马(1601~1665),他应用“最短路程原理”准确地解释了光在连续变化介质中的光路。因此,后来最短光程原理又被称为 费马原理 。
费马原理影响了包括莱布尼茨(1649~1716)和欧拉(1707~1783)在内的一大批数学家。成为了变分法出现的一个重要契机。
事实上,变分法出现的契机除费马原理以外,更重要的是当时风靡一时的 最速降线问题 。约翰·伯努利(1667~1748)可能本来只是想装个逼,他应该也没想到这个问题后来引起了泛函和分析力学的革命。在这个问题的解答上,伯努利、莱布尼茨等人已经很接近变分法的大门了。
一般认为现代变分法是1744年由欧拉提出的,他提出了著名的欧拉方程:
\frac{\mathrm{d}}{\mathrm{d}x}(\frac{\partial{F}}{\partial{y'}})-\frac{\partial{F}}{\partial{y}}=0
到这里,后续的拉格朗日、哈密顿等人做的事情所需要的数学基础都已经有了。剩下的工作就是把这些数学应用到解释世界上,赋予方程物理意义。
简单概括一下:从“ 某个量取极值 ”这个角度来考虑问题(泛函极值),这种思想从古希腊时期就有了。费马成功将其应用到光学上并有所成就。这种思想在解决最速降线问题上也派了用场。
最速降线问题是牛顿时代的著名问题(牛顿本人也是最早解出这一问题的几位大牛之一),牛顿定律是人类首次得到力学的 第一性原理 ,是人类用科学方法解释世界的一大成功。
此时,那个叫欧拉的人把之前这些零散的泛函极值问题用数学语言说清楚了。
那么,把变分法这个最新的数学工具应用到解释世界上,应该是一个很自然的思路了吧。
实际上,早在欧拉之前,莱布尼茨就曾经这样做过了(虽然他并没有完全确立变分法的数学基础)。别以为莱布尼茨只是个纯数学家,只在微积分的发明上和牛顿叫板,其实他也是做过力学第一性原理的尝试的。是他最早提出了“作用量”的概念,他定义的作用量:
S=\int_{t_0}^{t_1}mv^2\mathrm{d}t
(至于为啥莱布尼茨定义的作用量是对时间积分而不是对路程积分,那我就不知道了)
莱布尼茨声称: 在所有可能的运动轨迹中, 真实轨迹的作用量取极值(极大或极小)
不难发现,如果理想完整约束下系统是稳定且保守的(加上这么一大堆理想化的条件之后):
mv^2=2T=T+E-V=L+E
也就是说,莱布尼茨的作用量和后来哈密顿的作用量只差一个积分号里面的能量E。
莱布尼茨的作用量极值原理是错误的,并没有得到广泛的认可。但或许人们收到了他的启发,开始有人去思考 能量相同轨道的作用量 。这种想法是否自然呢?
我们今天当然知道,哈密顿原理是正确的,这是事实验证的。为啥当时没人鸟莱布尼茨?因为他的原理有时候会出错。然而,这时人们发现,在能量一定的时候,莱布尼茨原理会给出正确的结果(那是当然,因为这个时候它和哈密顿原理的结果是一样的)。
那么,这个时候,来研究能量一定的情况下的作用量似乎是比较自然的思路。
以此为基础,L. Maupertuis(中文一般是翻译成莫陪督?)于1747 年提出了力学中最早的(正确的) 最小作用量原理 ,史称莫陪督原理。莫陪督的作用量定义为:
S=\int_{q_0}^{q_1}p\mathrm{d}q ,其中q是坐标,p是动量。(你看,莫陪督作用量就是对路程积分的!)
莫陪督原理的叙述是: 在位形空间的给定两点间所有能量相同的轨迹中,实际轨迹的莫陪督作用量取极小值。
为啥莫陪督作用量对路程积分,而不是对时间积分了?很简单,因为给定两点间能量相同的轨迹,经过始末点的时间是不一样的,因此作用量变分时,两端时间不能固定。
可以证明莫陪督原理和哈密顿原理是等价的。莫陪督原理是很有用的,它适合用来解决 两固定点间的轨迹 变分问题。
至此,将变分法应用到力学中的尝试已经部分成功了。
不过,莫陪督解决的这类问题并不是力学问题的全部。他还没有给出一个第一性原理。
花开两朵,各表一枝。下面我们从牛顿定律出发,换个方向来考虑这个问题。
那时人类所掌握的力学第一性原理是伟大的牛顿定律。
什么叫第一性原理?就是说,原则上运用牛顿定律可以解决一切力学问题。一切!
但,为什么要说原则上?
因为实际上,有一些问题是复杂到你用牛顿那一套方法解不出来的。
牛顿定律是一套强大的工具,但并不是万能的。例如有很复杂的约束的情况(比如说,研究一个放在表明已知凹凸不平的桌面上的小球的运动),用受力分析和加速度那一套来解会麻烦死的。
人们应对约束这个问题,想了很多办法,虚功原理就是其中非常有效的一种。其中虚位移的概念,其实已经很有一些变分的味道了。
达朗贝尔(1717~1783)第一次将虚功原理和牛顿定律结合起来,于1743年《动力学》一书中提出了达朗贝尔原理:
\Sigma_i(F_i-m_i \ddot{r_i})\delta r_i=0
叙述为: 主动力和惯性力在系统任何虚位移下所做的元功之和为零。
这个原理和牛顿定律是完全等价的。但实际上稍加观察就会发现,这完全就是虚功原理加上牛顿第二定律,并没有什么创新性嘛,只是把它们写成一个方程比较好看而已(很像数学家干的事哦)。
接下来,拉格朗日(1736~1813)在达朗贝尔的基础上,于1788年发表了《分析力学》一书(据说,他很骄傲地说:“我整本力学书没用一张图!”),这被看作是分析力学的开端。书中提出了拉格朗日方程:
\frac{\mathrm{d}}{\mathrm{d}t}(\frac{\partial{L}}{\partial{\dot{q}}})-\frac{\partial{L}}{\partial{q}}=0 ,其中 L=T-V ,q是广义坐标
这不是和前面的欧拉方程长得一模一样吗?
没错。不难想象,他就是为了凑这个形式,才这样定义拉格朗日函数L的。
为什么要凑这个形式?因为这个形式的变分前人已经研究清楚了,只要把方程写成这个形式,就把未知问题转化为已知问题了。可以省去自己大量的计算工作,谁不想偷点懒呢?
这样,大概拉格朗日函数L的奇怪定义就不那么难理解了吧。
可以证明,拉格朗日方程和达朗贝尔原理是等价的,而达朗贝尔原理和牛顿定律是等价的。因此,拉格朗日方程就和牛顿定律一样是力学的第一性原理了。
大家发现,这个方程很有用。对于复杂约束问题,它比牛顿定律方便多了!
因此,拉格朗日这哥们儿一下子就牛逼了。
欧拉-拉格朗日方程是一个跟变分法有关的方程,但到这里仍然不是大家最熟悉的那个最小作用量原理。
大家熟悉的最小作用量原理是哈密顿(1805~1865)在1834年提出的。哈密顿作用量定义为:
S=\int_{t_0}^{t_1}L\mathrm{d}t ,L就是上面那个拉格朗日函数
哈密顿声称: 在 满足约束的 所有可能的运动轨迹中, 真实轨迹的作用量取最小值。
也即,写成泛函变分的形式: \delta S=0
可以证明,它和拉格朗日方程是等价的。也就是说,它和牛顿定律也是等价的,也是力学第一性原理。
觉不觉得哈密顿原理长得和之前的莱布尼茨原理和莫陪督原理很像?
不难想象,哈密顿一定是受了两方面的启发, 用最小作用量的数学语言,叙述一个和已知正确的拉格朗日方程等价的结论。
至此,一开始看起来不自然的一切,是不是都显得自然了许多?
一贯地,数学工具(变分法)是先于物理原理出现的。变分法这个数学工具是受到之前费马伯努利等人的启发而出现的。
人们研究泛函变分的初衷是从宏观上(或者说从积分意义上)来解决问题。这种意识是从光学中来的,最早可追溯到古希腊。
在有了数学工具以后,人们迫不及待地将之投入力学问题中,但没有完全成功了(结论错误,或者不全面)。
相反,这个时候另一批人从微观(或者说从微分意义上)出发,一步一脚印地寻找牛顿定律的等价描述,直到拉格朗日获得成功。
(其实,欧拉-拉格朗日方程虽然是从微分出发的,但也是变分法的产物。这是由于,虚功原理就已经包含了变分的思想。)
此时,时机已成熟,哈密顿才得以将两方的成果综合起来, 用最小作用量原理的形式描述了一个力学第一性定律 。或者说, 拉格朗日方程是微分变分原理,哈密顿原理是积分变分原理 。如果没有前人的那些尝试,哈密顿的最小作用量原理就如同空中楼阁,是不可能建起来的。