


还记得当年的飞思卡尔智能车竞赛吗?

电子类控制类专业出身的同学们一定对飞思卡尔智能汽车竞赛有所了解,没亲自参与过也一定见周围同学们玩过。今天老王就和大家聊一聊飞思卡尔智能汽车竞赛。
源自国外
全国大学生“飞思卡尔”杯智能汽车竞赛,起源于韩国汉阳大学汽车控制实验室,是在飞思卡尔半导体公司资助下举办的以HCS12单片机为核心的大学生课外科技竞赛。
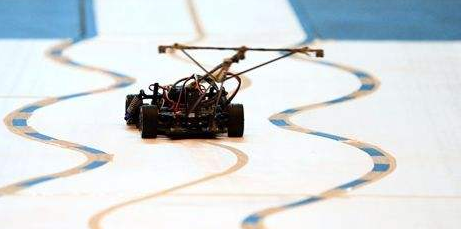
组委会提供一个标准的汽车模型、直流电机和可充电式电池,参赛队伍要制作一个能够自主识别路径的智能车,在专门设计的跑道上自动识别道路行驶,最快跑完全程而没有冲出跑道并且技术报告评分较高为获胜者。
国内壮大
那是在2006年,受国家教育部高等教育司委托(教高司函[2005]201号文),高等学校自动化专业教学指导分委员会在清华大学主办进行第一届“飞思卡尔”杯全国大学生智能汽车邀请赛。
第一届邀请赛由清华大学承办,飞思卡尔半导体公司协办,共有57所大学的112支队伍参加。内容就是要求参赛队将一款从韩国进口的车模(免费赠送给邀请队伍)改造成能够沿着带有中心引导线的赛道(55厘米宽)跑完一周。


2007年第二届来到上海,由上海交通大学承办。在北京上海两位带头大哥的引领下,2008年第三届由东北大学承办,并开始出现了摄像头组和光电组的分化,两组各自比赛决出冠亚季军。从08年的第三届开始被教育部批准列入国家教学质量与教学改革工程资助项目中9个科技人文竞赛之一。2009年第四届由北京科技大学承办,并被邀申请列入国家教学质量与教学改革工程资助项目。飞思卡尔智能汽车竞赛逐渐开始被全国大学生所熟悉,并被各大高校作为重点科研项目,组织和带领学生参加比赛。
摄像头组
使用摄像头作为核心传感器,一般允许使用光电管,超声波传感器作为辅助检测手段。



光电组
传感器允许使用各类光电传感器、超声传感器器件进行赛道和环境检测。一般也允许使用指定型号的线性ccd传感器。

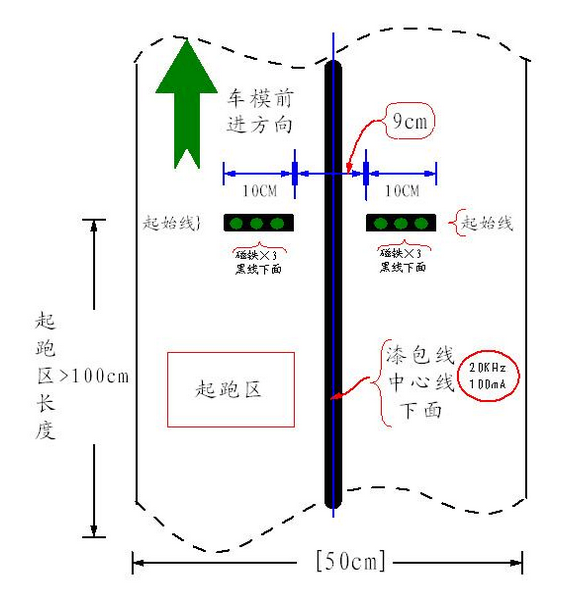
2010年第五届由杭州电子科技大学承办,开始出现电磁组的分化,并一直维持着三组分立的比赛赛制到2015年第十届比赛。随之而来的就是赛道的变化,在摄像头组和光电组共用的黑色引导线下的赛道中嵌入了电磁漆包线,以引导车模方向。

电磁组
使用电磁感应原理来检测赛道,传感器相对比较简单,几个电感就能跑完比赛,不允许使用任何光电传感器来辅助识别赛道。

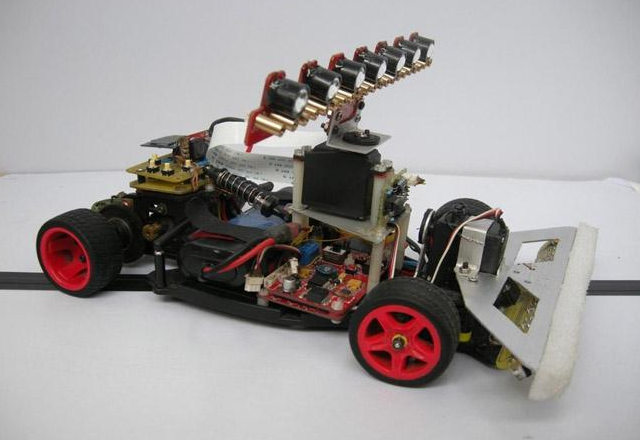
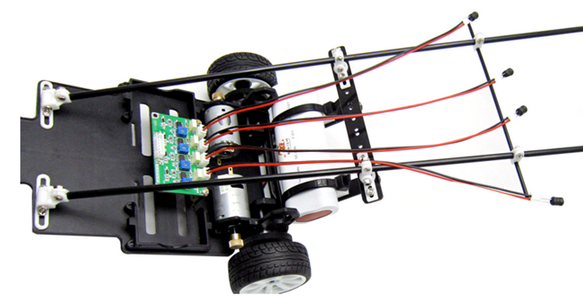
2011年第六届由西北工业大学承办,2012年第七届由南京师范大学承办,在第七届上又玩儿起了新花样,要求电磁组车要直立行走。于是就变成了这个鬼样子。

电磁组直立
在原电磁组基础上增加平衡控制的相关传感器,一般为角度传感器和加速度计,此外就是要拆掉两个轮子。

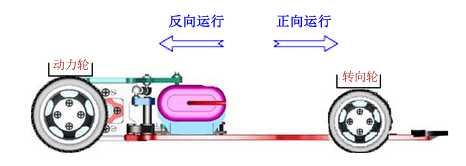
2013年第八届由哈尔滨工业大学承办,让电磁组躺下了,又让光电组站起来,其中摄像头组车模要求倒着走,即后驱改前驱。

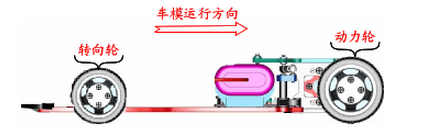
2014年第九届由电子科技大学承办,又把摄像头组折腾站起来了,再让光电组躺下休息,但要求可根据赛道要求随时调整车模运行方向。

摄像头/光电组直立


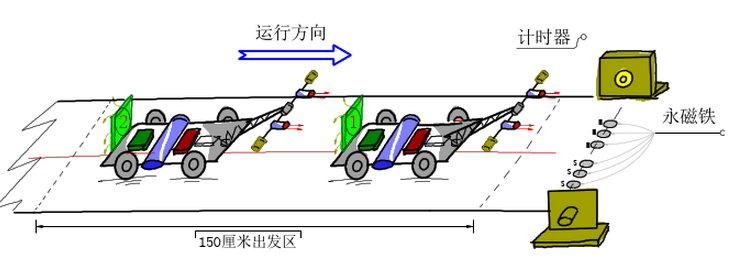
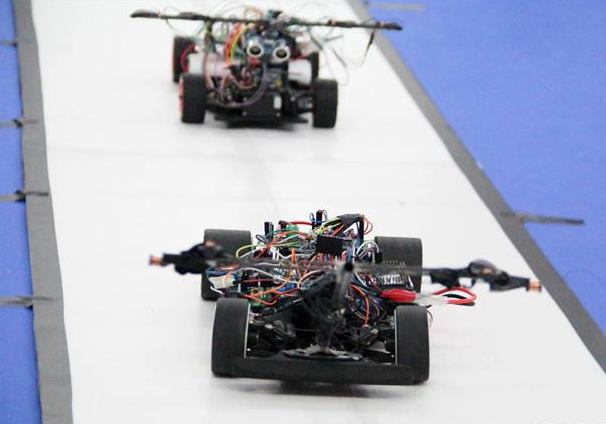
2015年第十届由山东大学承办,又回来玩儿电磁组,变成双车追逐模式。即两辆车间隔出发,不允许碰撞和接触。比赛时间为从第一辆车出发开始计时,到第二辆车到达终点结束。总时间为比赛时间和两车到达终点时间差的五倍之和。

哦对了,光电组继续站着。
电磁组双车追逐
两车模可同时采用电磁感应来检测赛道,也可以前车检测,后车通过光电,摄像头或无线通讯方式跟踪前车。一般后车的赛道自检测,超声波测距等都会用上。

改朝换代
2015年3月份,荷兰恩智浦半导体公司(NXP Semiconductors)宣布以约118亿美元现金加股票方式收购飞思卡尔,当时老王第一反应想到的就是智能汽车竞赛是不是要改名了,要知道飞思卡尔在中国大学生心中的地位,是其他公司远不能比拟的。
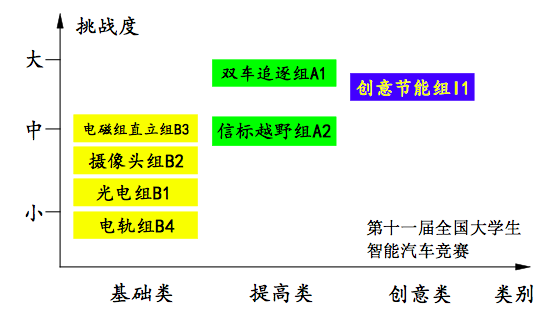
2016年第十一届由中南大学承办,正式更名为全国大学生恩智浦杯智能汽车竞赛。


至此,由2006年创世纪,第十届结束之后,飞思卡尔智能车比赛结束,改朝换代更名为NXP“恩智浦”。其中比赛内容更加的无厘头,现在发展成了7个组别的比赛。电磁组直立和双车追逐正式分成两组,并新增电轨组,创意节能组,信标越野组。

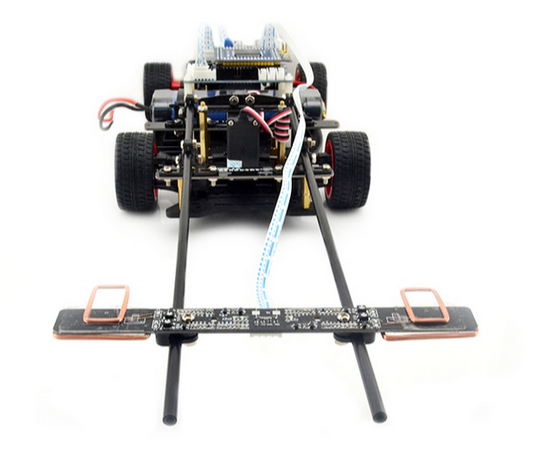
电轨组和创意节能组使用新的赛道,其引导方式是通过铺设在赛道中心的两条铝膜胶带完成的。铝膜胶带一方面起到引导车模的作用,同时又为“创意节能组”的车模提供电源(电轨组比赛中不通电)。两条铝膜胶带铺设在赛道中心线两侧,相距 5mm。

电轨组
使用电感线圈或者其它金属检测线圈检测赛道中的铝膜胶带。同样禁止使用任何光电、摄像头传感器检测赛道信息。

创意节能组
铝膜胶带上电源为12V的直流电源,并且有5A电流限流保护功能。当电流超过5A时,电源会保护停止供电。经过2秒钟后,再恢复供电。所以供电控制和节能很重要,一般会使用到超级电容和无刷电机等。


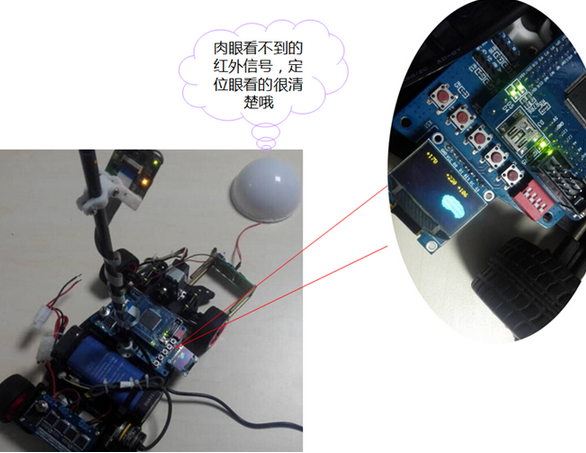
信标越野组应该是最特殊的一个组别,不再是跑圈速的形式。而是采用信标导引的方式进行比赛。在铺有蓝色广告布的平整场地内随机安放五个左右的信标,车模在信标的导引下做定向运动。

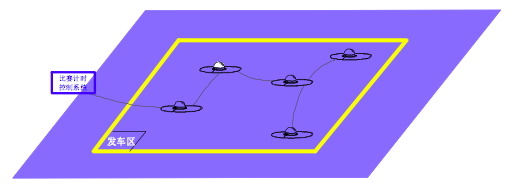
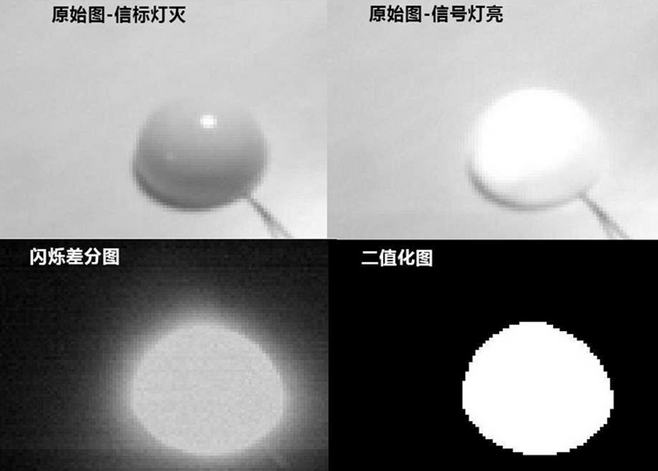
发车时所有的信标都是熄灭状态。开始比赛后,比赛系统自动会点亮第一个信标,点亮的信标会以 10Hz 的频率发送红色和红外闪烁光。此时选手的车模能够识别确定信标的方位并做定向运动。当车模上安放的磁标进入信标附近的感应线圈后,比赛系统会自动切换点亮到下一个信标,车模随机前往第二个点亮的信标。此过程将会进行 10 次左右。最终比赛时间是从当一个信标点亮,到最后一次信标熄灭为止。
信标越野组
一般通过光电传感器、摄像头等识别信标的红光或者红外光进行定位。


未来的路
看这一路10多年走过来,智能汽车竞赛的名字变了,赛道变了,规则也变了,但同学们的参赛热情未变,比赛的科研影响力也未曾变。未来定会有更多的花样玩出来,也定会有更复杂的赛道,更复杂的规则搞出来。
老王坚信,作为大学生科研竞赛,赛制的制定者们定思考过未来智能汽车和智能交通的样子,最终转换成比赛,启蒙着我们对未来交通的思考。
未来的路,他会是什么样子呢?