

数据结构与算法 - 图论

这篇文章是我当时在上数据结构课的时候做的笔记的,现在重新整理了一下,也算是一篇简单的科普文。
基本概念:
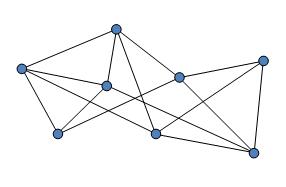
图论〔Graph Theory〕是数学的一个分支。它以图为研究对象。图论中的图是由若干给定的点及连接两点的线所构成的图形,这种图形通常用来描述某些事物之间的某种特定关系,用点代表事物,用连接两点的线表示相应两个事物间具有这种关系。
图论是一种表示 "多对多" 的关系
图是由顶点和边组成的:(可以无边,但至少包含一个顶点)
- 一组顶点:通常用 V(vertex) 表示顶点集合
- 一组边:通常用 E(edge) 表示边的集合
图可以分为有向图和无向图,在图中:
- (v, w) 表示无向边,即 v 和 w 是互通的
- <v, w> 表示有向边,该边始于 v,终于 w
图可以分为有权图和无权图:
- 有权图:每条边具有一定的权重(weight),通常是一个数字
- 无权图:每条边均没有权重,也可以理解为权为 1
图又可以分为连通图和非连通图:
- 连通图:所有的点都有路径相连
- 非连通图:存在某两个点没有路径相连
图中的顶点有度的概念:
- 度(Degree):所有与它连接点的个数之和
- 入度(Indegree):存在于有向图中,所有接入该点的边数之和
- 出度(Outdegree):存在于有向图中,所有接出该点的边数之和
图的表示:
图在程序中的表示一般有两种方式:
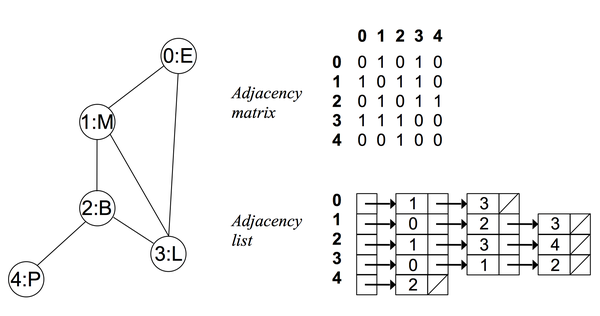
1. 邻接矩阵:
- 在 n 个顶点的图需要有一个 n × n 大小的矩阵
- 在一个无权图中,矩阵坐标中每个位置值为 1 代表两个点是相连的,0 表示两点是不相连的
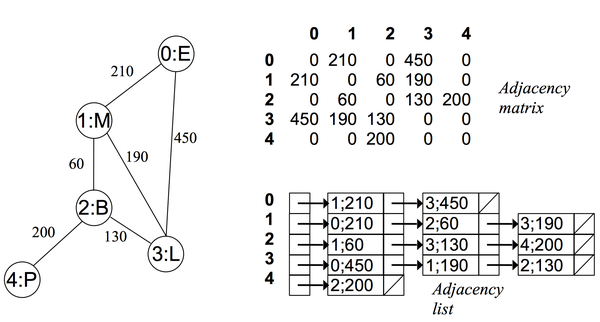
- 在一个有权图中,矩阵坐标中每个位置值代表该两点之间的权重,0 表示该两点不相连
- 在无向图中,邻接矩阵关于对角线相等
2. 邻接链表:
- 对于每个点,存储着一个链表,用来指向所有与该点直接相连的点
- 对于有权图来说,链表中元素值对应着权重
例如在无向无权图中:
而在有向无权图中:
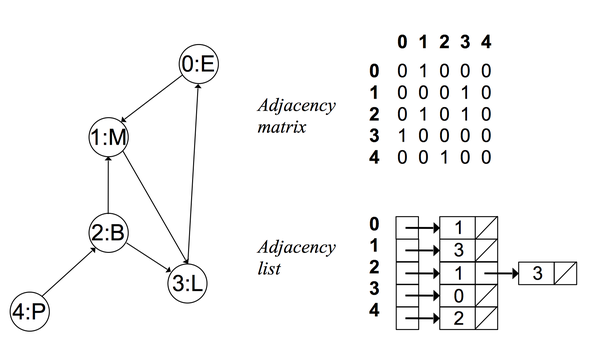
-
邻接矩阵由于没有相连的边也占有空间,因此存在浪费空间的问题,而邻接链表则比较合理地利用空间
-
邻接链表比较耗时,牺牲很大的时间来查找,因此比较耗时,而邻接矩阵法相比邻接链表法来说,时间复杂度低。
图的遍历:
图的遍历就是要找出图中所有的点,一般有以下两种方法:
1. 深度优先遍历:(Depth First Search, DFS)
基本思路:深度优先遍历图的方法是,从图中某顶点 v 出发
- 访问顶点 v
- 从 v 的未被访问的邻接点中选取一个顶点 w,从 w 出发进行深度优先遍历
- 重复上述两步,直至图中所有和v有路径相通的顶点都被访问到
伪码实现:
//伪码实现,类似于树的先序遍历
public void DFS(Vertex v){
visited[v] = true;
for(v 的每个邻接点 W){
if(!visited[W]){
DFS(W);
2. 广度优先搜索:(Breadth First Search, BFS)
广度优先搜索,可以被形象地描述为 "浅尝辄止",它也需要一个队列以保持遍历过的顶点顺序,以便按出队的顺序再去访问这些顶点的邻接顶点。
实现思路:
- 顶点 v 入队列
- 当队列非空时则继续执行,否则算法结束
-
出队列取得队头顶点 v;访问顶点 v 并标记顶点 v 已被访问
- 查找顶点 v 的第一个邻接顶点 col
- 若 v 的邻接顶点 col 未被访问过的,则 col 继续
- 查找顶点 v 的另一个新的邻接顶点 col,转到步骤 5 入队列,直到顶点 v 的所有未被访问过的邻接点处理完。转到步骤 2
要理解深度优先和广度优先搜索,首先要理解搜索步,一个完整的搜索步包括两个处理
- 获得当前位置上,有几条路可供选择
- 根据选择策略,选择其中一条路,并走到下个位置
相当于在漆黑的夜里,你只能看清你站的位置和你前面的路,但你不知道每条路能够通向哪里。
搜索的任务就是,给出初始位置和目标位置,要求找到一条到达目标的路径。
-
深度优先就是,从初始点出发,不断向前走,如果碰到死路了,就往回走一步,尝试另一条路,直到发现了目标位置。这种不撞南墙不回头的方法,即使成功也不一定找到一条好路,但好处是需要记住的位置比较少。
-
广度优先就是,从初始点出发,把所有可能的路径都走一遍,如果里面没有目标位置,则尝试把所有两步能够到的位置都走一遍,看有没有目标位置;如果还不行,则尝试所有三步可以到的位置。这种方法,一定可以找到一条最短路径,但需要记忆的内容实在很多,要量力而行。
最短路径算法 (Shortest Path Algorithm)
1. 无权图:
问题:在图中找到某一个顶点到其它所有点的距离
对于初始点 v 来说,某个点的 d 代表该点到初始点的距离。
基本步骤:
- 将所有点的距离 d 设为无穷大
- 挑选初始点 s,将 ds 设为 0,将 shortest 设为 0
- 找到所有距离为 d 为 shortest 的点,查找他们的邻接链表的下一个顶点 w,如果 dw 的值为无穷大,则将 dw 设为 shortest + 1
- 增加 shortest 的值,重复步骤 3,直到没有顶点的距离值为无穷大

在有权图中,常见的最短路径算法有 Dijkstra 算法 Floyd 算法
迪杰斯特拉 Dijkstra 算法:Dijkstra 算法适用于权值为正的的图
Dijkstra 算法属于单源算法,即只能求出某点到其它点最短距离,并不能得出任意两点之间的最短距离。
算法步骤:
- 将所有边初始化为无穷大
- 选择一个开始的顶点,添加到优先队列中
- 对于该点的所有邻接顶点进行判断,如果到该点的距离小于原先的值,则将该值进行更新
- 将该点所有邻接顶点添加到优先队列中
- 从优先队列中挑选出一个路径值最小的顶点,将其弹出,作为新的顶点,重复步骤 3,4,5
- 直到所有点都被处理过一次
例如:

首先选取 v0 作为起始点,添加到优先队列中,将v0弹出,然后对 v0 邻接点进行判断,由于一开始所有边都为无穷大,那么 <v0, v1> 和 <v0, v3> 都更新,值为 2 和 1,按路径大小升序将v3、v1添加到优先队列。

之后将 v3 弹出,对所有 v3 邻接点进行值的更新,并将所有邻接点按路径大小升序添加到优先队列中,若遇到值相同,则无所谓其先后顺序


重复这样的过程,直到所有的点都被处理过,则算法终止,这样最后可以得出从 v0 到其它 v1~v6 节点的距离。
Dijkstra 算法适合于权值为正的情况下,若权值为负则不能使用,因为出现死循环。这时候我们需要计算每个顶点被处理的次数,当某个顶点已经处理过的话,就跳出该循环。
佛洛伊德 Floyd 算法:可以求出任意两点的最短距离
Floyd 算法是一个经典的动态规划算法。用通俗的语言来描述的话,首先我们的目标是寻找从点 i 到点 j 的最短路径。
从任意节点 i 到任意节点 j 的最短路径不外乎 2 种可能:
- 是直接从 i 到 j
- 是从 i 经过若干个节点 k 到 j
所以,我们假设 Dis(i,j) 为节点 u 到节点 v 的最短路径的距离,对于每一个节点 k,我们检查Dis(i,k) + Dis(k,j) < Dis(i,j) 是否成立,如果成立,证明从 i 到 k 再到 j 的路径比 i 直接到 j 的路径短,我们便设置 Dis(i,j) = Dis(i,k) + Dis(k,j),这样一来,当我们遍历完所有节点 k,Dis(i,j) 中记录的便是 i 到 j 的最短路径的距离。
时间复杂度: O(n^3)
for(int k=0; k<n; k++) {
for(i=0; i<n; i++) {
for(j=0; j<n; j++)
if(A[i][j]>(A[i][k]+A[k][j])) {